In one of the first pieces of documentation proving Apple's investigation into autonomous vehicles, the U.S. Patent and Trademark Office on Thursday published a patent application describing a basic collision avoidance system that could one day serve as the underpinnings of a self-driving car telemetry solution.
Apple's patent application for "Collision Avoidance Of Arbitrary Polygonal Obstacles," offers proof that the company is investigating the application of machine learning and computer vision to autonomous "agents" (vehicles).
Designed for robotics — a field from which autonomous cars emerged — the disclosed systems and methods detail a basic collision avoidance technique capable of successfully navigating an environment without prior knowledge of the objects within. In particular, the system is able to operate in both two-dimensional and three-dimensional space, often a difficult task for computer vision systems.
Apples technology can be applied to avoid convex and concave objects, whether the obstacles are moving or stationary. Importantly for a self-driving vehicle, the avoidance mechanism can further use simple geometry to identify obstacle edges the machine is most likely to hit.
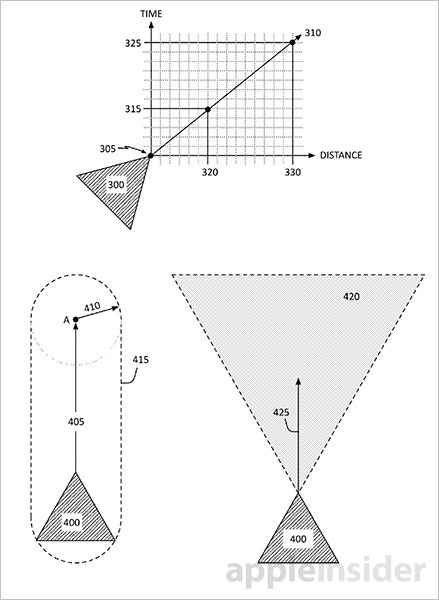
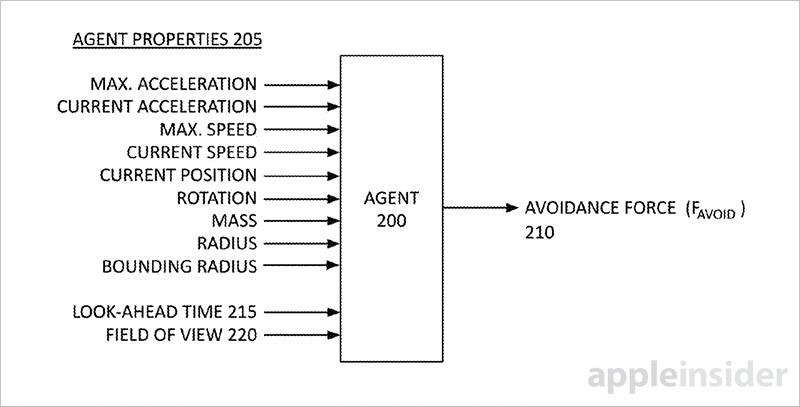
Self-driving vehicle systems are often limited by look-ahead time, or the ability to predict future positioning in space, and a camera or other sensing hardware's operational field of view. Extending the capabilities of both metrics requires advanced optics, a powerful processor and complex detection and avoidance algorithms.
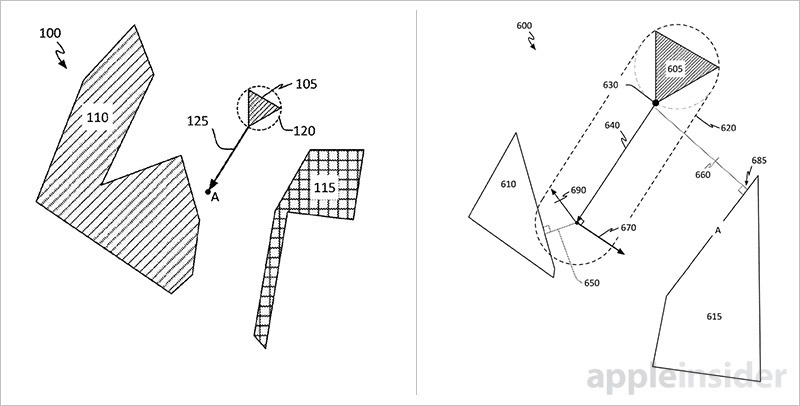
Apple's system looks to alleviate some computational overhead by first determining an immediate current position and basic motion vectors. Updating the vehicle's view of its surrounding environment up to 60 times per second, the method is able to detect multiple oncoming obstacles, or more specifically the distance to edges of each obstacle. Potential collisions are determined by comparing the edge distance against a known bounding radius.
In practice, if the edges of object within an environment are determined to be outside of a system's bounding radius, the vehicle is allowed to continue along its original motion. When a potential collision event is predicted, the system selects the edge vector closest to the vehicle's current position and calculates the force needed to avoid the obstacle. This calculation takes into account vehicle mass, acceleration and other vital measurements.
Once the first object is avoided, the system moves on to a next obstacle, carrying through data learned from the previous encounter.
Apple is widely rumored to be working on autonomous driving systems after scaling back secret plans to build a full-fledged self-driving car. Most recently, the company sent a proposal to the National Highway Traffic Safety Administration requesting the government relax autonomous vehicle testing regulations for industry newcomers, suggesting the company intends to conduct road tests in the future.
Apple's collision avoidance system patent application was first filed for in June 2015 and credits Bruno M. Sommer, Norman N. Wang, Timothy R. Oriol and Jacques P. Gasselin de Richebourg as its inventors.







