'Apple Car' needs Machine Learning to make driving decisions fast enough
 William Gallagher
William Gallagher
Apple is planning to use Machine Learning in the "Apple Car," specifically because current processors are not fast enough to autonomously make key driving decisions without the technology.
It was already expected that Apple would use Machine Learning (ML) in the expecteed "Apple Car," and not least since the company's AI chief John Giannandrea was placed in charge. Now, however, a newly-revealed patent explains just how ML will be used - and also why it is needed.
"Evaluating varying-sized action spaces using reinforcement learning," is concerned with the car benefiting from ML The idea of a car learning from its own mistakes is a little scary, but this is more like the car getting to use accumulated data from all such cars.
It's all to do with how decisions taken at the wheel may have to be extremely fast. Even a correct decision about, say, a lane change or avoiding a collision, could be fatal if it is not completed quickly enough.
"Until relatively recently," says the patent, "due to the limitations of the available hardware and software, the maximum speed at which computations for analyzing relevant aspects of the vehicle's external environment could be performed was insufficient to enable non-trivial navigation decisions to be made without human guidance."
The phrase "until relatively recently," seems to imply that hardware and software are getting better. They are, but Apple then says it's still simply not enough.
"Even with today's fast processors, large memories, and advanced algorithms," it continues, "however, the task of making timely and reasonable decisions... of the vehicle's environment remains a significant challenge."
The patent talks about the complexity of autonomous decision making which is "based neither on excessively pessimistic assumptions, nor on excessively optimistic assumptions." Then cars might be able to drive themselves, but they'll never drive alone - so the "unpredictable behaviors" of other drivers in other cars are a factor.
Plus the real world is a lot messier than any test environment, so Apple also notes that autonomous driving decisions will have to be made even when there is "incomplete or noisy data."
Over 17,000 words, the patent describes situations to do with the car's "action space." That's the time and distance within which the car has to make its decisions.
"In some states, such as when the vehicle is traveling on a largely-empty straight highway with no turns possible for several kilometers or miles," continues the patent, "the number of actions to be evaluated may be relatively small; in other states, as when the vehicle approaches a crowded intersection, the number of actions may be much larger."
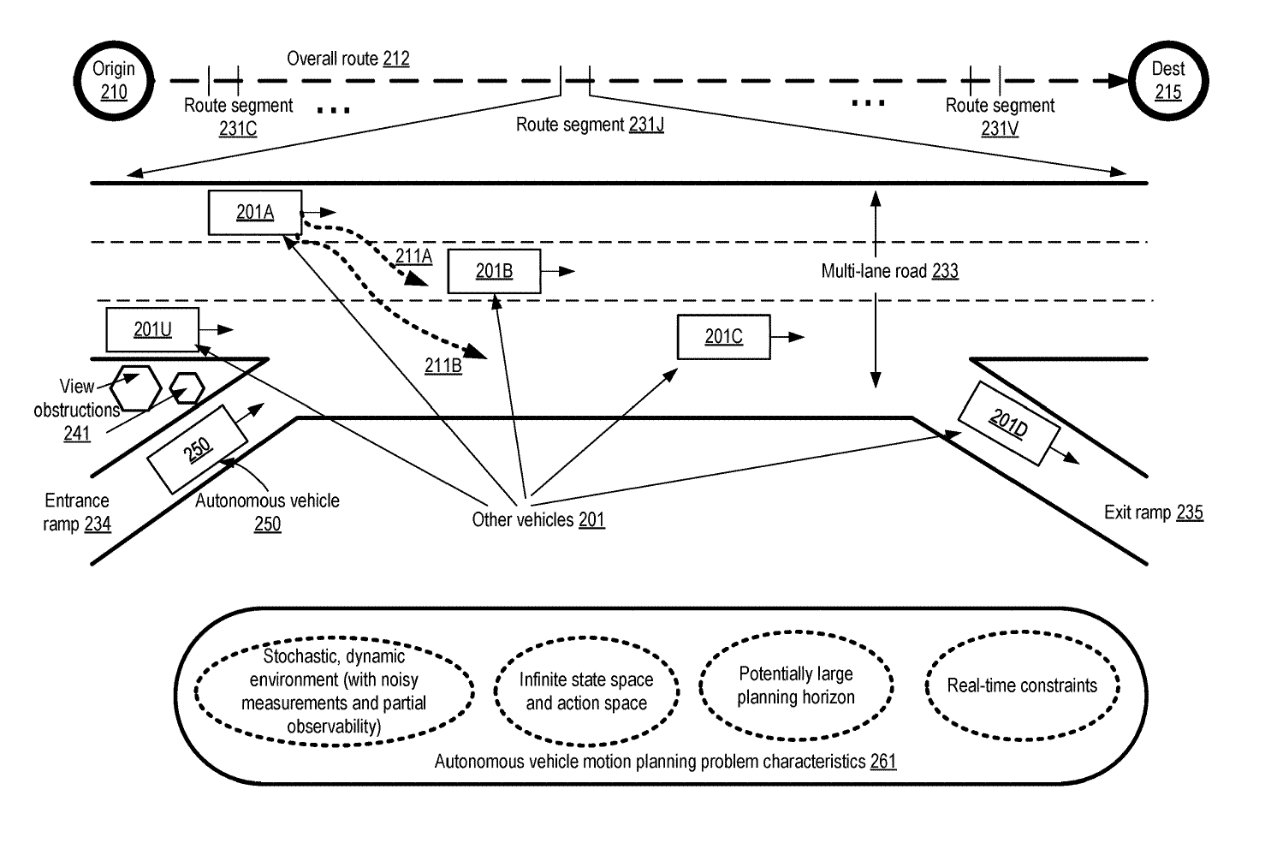
In each case, the car's systems have to determine "the current state of the environment" around the vehicle. Then it may need to identify "a corresponding set of feasible or proposed actions which can be undertaken."
An action could be "turn left," or "change lanes." In at least some cases, ML can be used to help the car assign a number or value to each possible decision, and then determine the best course of action.
"[For example,] multiple instances or executions of a reinforcement learning model may be employed at the vehicle to obtain respective value metrics for the actions," says the patent, "and the value metrics may be used to select the action to implement."
This patent is credited to two inventors, Martin Levihn, and Pekka Tapani Raiko.
Levihn's previous related work includes a patent for a "behavior planner" for a vehicle, another autonomous decision-making system.














 Amber Neely
Amber Neely
 Thomas Sibilly
Thomas Sibilly
 AppleInsider Staff
AppleInsider Staff

 Malcolm Owen
Malcolm Owen
 Christine McKee
Christine McKee









14 Comments
When a car is able to successfully navigate the Elephant and Castle Roundabout in London, at night, during rush hour, in December, in the rain, then it shall be deemed safe.
Isn't IBM selling Watson?
There were recent rumours of a "C1" chip developed by Apple to run the car. Seems like it didn't suffice.
I am in agreement with other critics of self-driving cars. As long as humans remain in control of cars ,machine learning, artificial intelligence, sensors, etc. will be no match for the eccentricities, poor judgement, inattention, and road rage of homo sapien drivers.
On a more positive note, I read an article about an Israeli company who has contracted to build a one mile stretch of highway in Michigan with charging coils embedded in the pavement to allow wireless charging of EVs while they drive over the road. Of course the EVs will also be equipped with coils as well. If this turns out to be a practical solution to the range issue of EVs it will change everything.